

 收藏
收藏 
 湖南 · 长沙
湖南 · 长沙











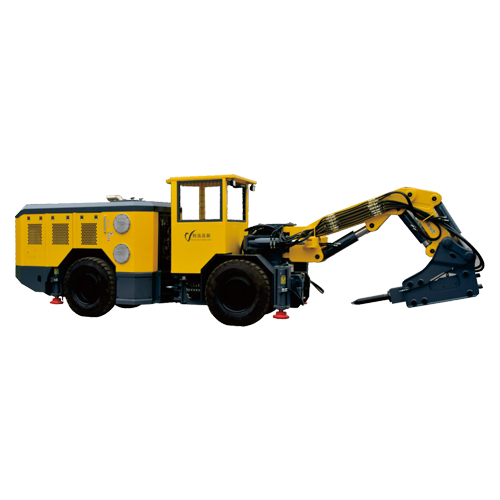



CY-S22撬毛机器人
CY-S22 CRUSHING ROBOT
传统地下矿山在凿岩爆破后基本上都是通过人工手持撬棍清理浮石,劳动强度大、效率低,而且危险性高。撬毛机器人可实现落矿后对采场同时进行顶板侧帮撬毛、大块破碎。
Traditional underground mines usually resort to manual lifting of crowbars to ciean floating stones after rock drilling and blasting, which is labor-intensive, inefficient, and highly dangerous. Crushing robots can realize the synchronization of roof side rock crushing, mass crushing.
技术特点
Technical Characteristics
一、多自由度高适应冗余臂架系统
MULTI DEGREES OF FREEDOM HIGH ADAPTIVE REDUNDANT BOOM SYSTEM
多自由度高适应冗余臂架系统可精确实现臂架回转、升降及属具精确定点作业,作业范围大,动作灵活,作业无死角,有效提高操作灵活性和现场适应性,能够满足复杂顶板、侧帮的撬毛作业。
The multi degree of freedom and high adaptability redundant boom system can accurately realize the boom rotation, lifting and accurate fixed-point operation of accessories. The operation range is large, the action is flexible, and there is no dead angle in the operation. It can effectively improve the operation flexibility and site adaptability, and can meet the needs of roughing operation of complex roof and side slope.
二、智能化作业属具系统
INTELLIGENT OPERATION ACCESSORIES SYSTEMM
集成冲击、刮削于一体的智能化作业属具系统可轻松实现软岩刮削作业、硬岩冲击作业,根据使用需求通过切换装置实现一键切换,无需来回拆卸和搬运,省时、省心、省力。
The intelligent operation accessories system integrated with impact and scraping can easily realize soft rock scraping operation and hard rock impact operation. According to the use requirements, one key switch can be realized by switching device, which does not need to be disassembled and transported back and forth, saving time, heart and effort.
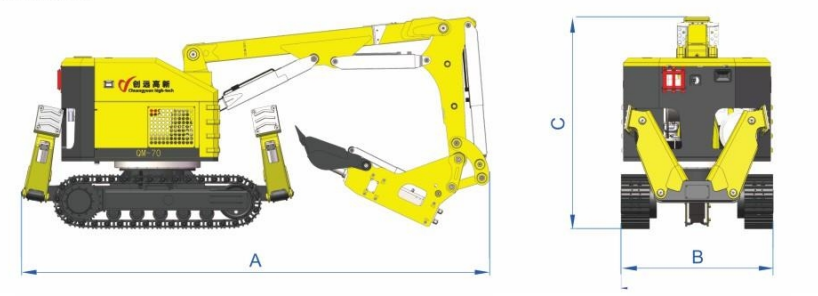
外形尺寸
Shape Dimension
外形尺寸
Shape Dimension
| A (mm) |
B (mm) |
C (mm) |
质量 weight(t) |
|
| CY-S22 | 4581 | 1600 | 2235 | 6.5 |
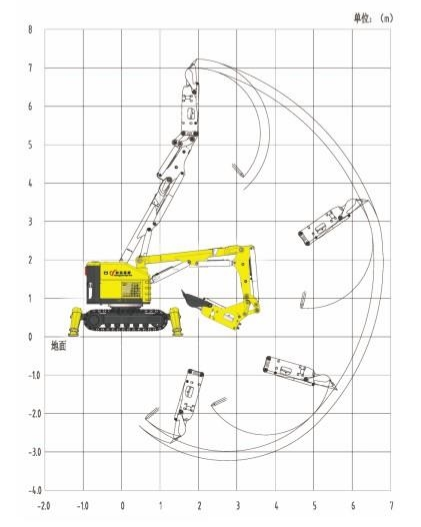
撬毛机器人掘进作业范围
DIMENSIONS OF CRUSHING ROBOT
性能参数
Performance Parameter
| 项目items | 单位unite | 数值value | |
| 作业参数 operation |
最大工作高度 Maximum working height | mm | 7000 |
| 最大工作长度 Maximum working length | mm | 6560 | |
| 最大工作深度 Maximum working depth | mm | 2985 | |
| 转台回转速度 Swing speed | rpm | <3 | |
| 破碎锤 铲斗参数 Hammer/Bucket parameters |
冲击频率 Impact frequency | bpm | 400~800 |
| 工作流量 Working flow | L/min | 50~90 | |
| 工作压力 Working pressure | bar | 20~150 | |
| 铲斗容量 Bucket capacity | m³ | 0.1 | |
| 行走参数 travel |
行走方式 Driving mode | — | 覆带式Crawler |
| 转弯半径 Turning radius | m | 原地360°360°in place | |
| 行走速度 Driving speed | km/h | 0~2.5 | |
| 爬坡能力 gradeability | ° | 30 | |
| 离地间隙 Ground clearance | mm | 260 | |
| 动力参数 power |
电机功率 Motor Power | kW | 37 |
| 电压 Voltage | V | 380/660/1000/1140 |


